ROS Node Model¶
Within a Component, a ROS Node is represented by a GenericDomainModel with the following Attributes.
| Attributes | Value | Description |
|---|---|---|
| Type | node | |
| Domain | ros | |
| Attribute 0 | [ROS package] | ROS package name, - e.g. “gazebo_ros” |
| Attribute 1 | [executable name] | ROS node executable name - e.g. “spawn_model” |
| Attribute 2 | [output] | “screen” - stdout/stderr to screen
“log” - stdout/stderr to log file
|
| Attribute 3 | [launch-prefix] | Node’s launch arguments - e.g. “xterm -e” |
If the CyPhy Master Interpreter is run, these Attributes will be used to populate a node element in the generated ROS .launch file:
<node
name=[GenericDomainModel name]
pkg=[ROS package]
type=[executable name]
output=[output]
launch-prefix=[launch-prefix]
/>
Note
For a better understanding of the roslaunch XML node syntax, please consult its documentation
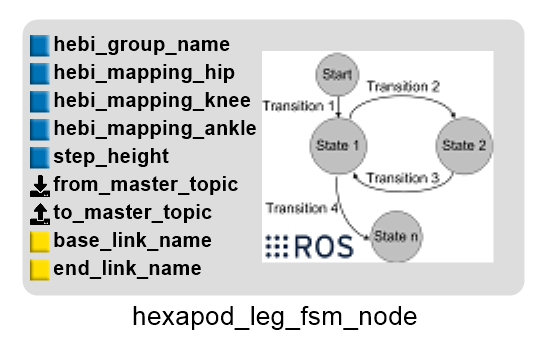
Hexapod Leg FSM Node GenericDomainModel (Outside)
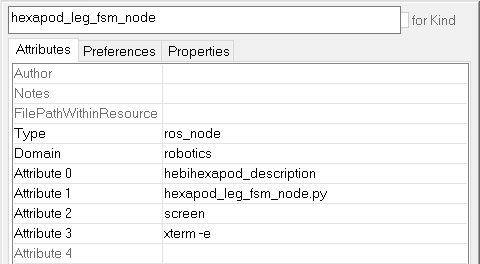
Hexapod Leg FSM Node GenericDomainModel (Attributes)
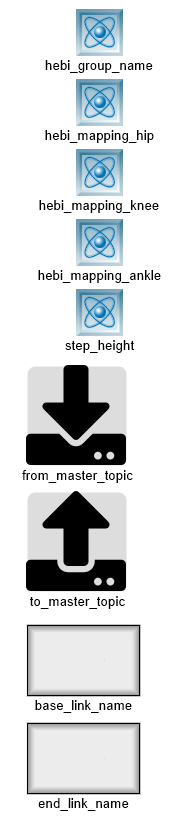
Hexapod Leg FSM Node GenericDomainModel (Inside)
A ROS Node Model GenericDomainModel may contain the following elements: