Introduction¶
Welcome to the documentation for the TASCK toolchain.
The TASCK Toolchain¶
The TASCK toolchain is a model-based robot design platform built on top of OpenMETA.
Using the TASCK toolchain, a designer can:
- Compose a unique robot design from a library of modular physical and behavioral components.
- Express and vary parametric and discrete design options.
- Generate simulation (Gazebo) and runtime (ROS) artifacts.
- Run Multi-Disciplinary Design Analysis and Optimization experiments
The TASCK toolchain is extendable, meaning that users can add custom components, models, interpreters, and execution workflows.
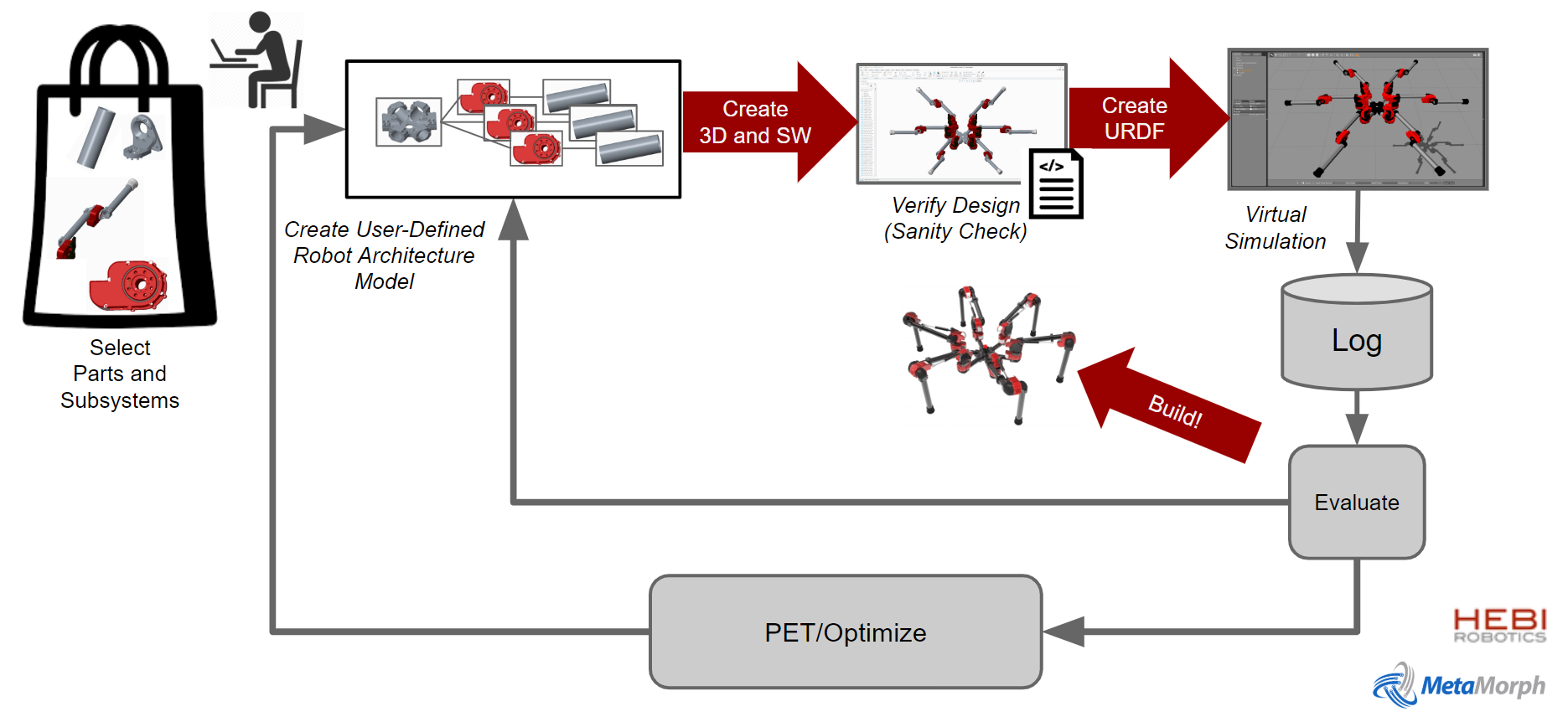
TASCK Toolchain Workflow Overview
Acknowledgements¶
This material is based upon work supported by the DARPA - Tactical Technical Office under Contract No. HR001117C0080. The views, opinions, and/or findings expressed are those of the author(s) and should not be interpreted as representing the official views or policies of the Department of Defense or the U.S. Government.
Distribution Statement “A” (Approved for Public Release, Distribution Unlimited). If you have any questions, please contact the Public Release Center: DARPA Public Release Center (PRC), 675 N. Randolph Street, Room 03-028, Arlington, VA 22203-1714